DigiRL: Training In-The-Wild Device-Control Agents with Autonomous Reinforcement Learning
LLM (VLM) +RL 的完美之作!在 Pretraining 的基础上进行 Offline RL,然后在执行任务时通过 Online RL 更新参数,特色是能够从多轮交互中学习、更新参数,而不是通过专家知识微调一个单步交互模型。实验也做得非常详细。不过 RL 的部分我还看不太懂,需要继续学习。
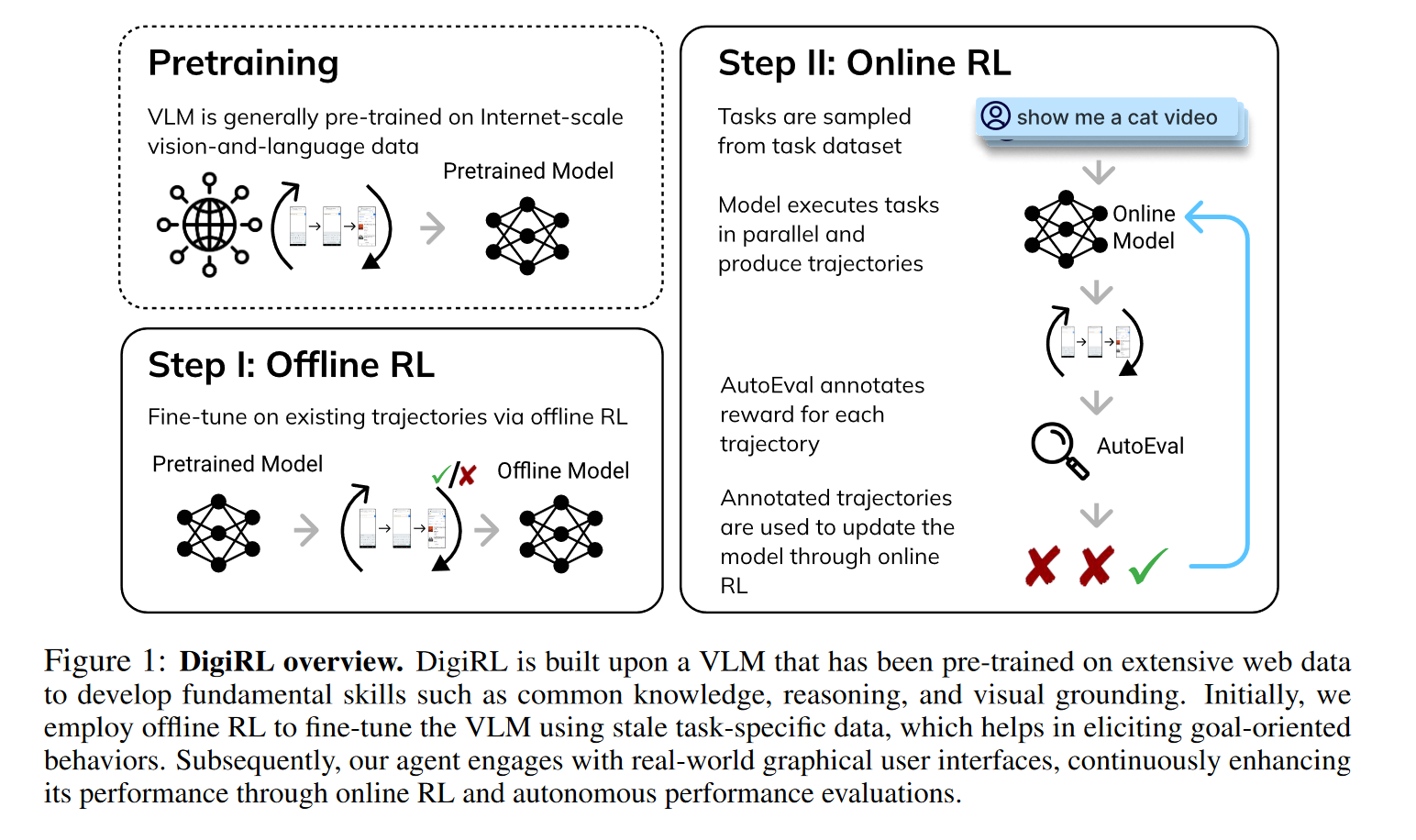
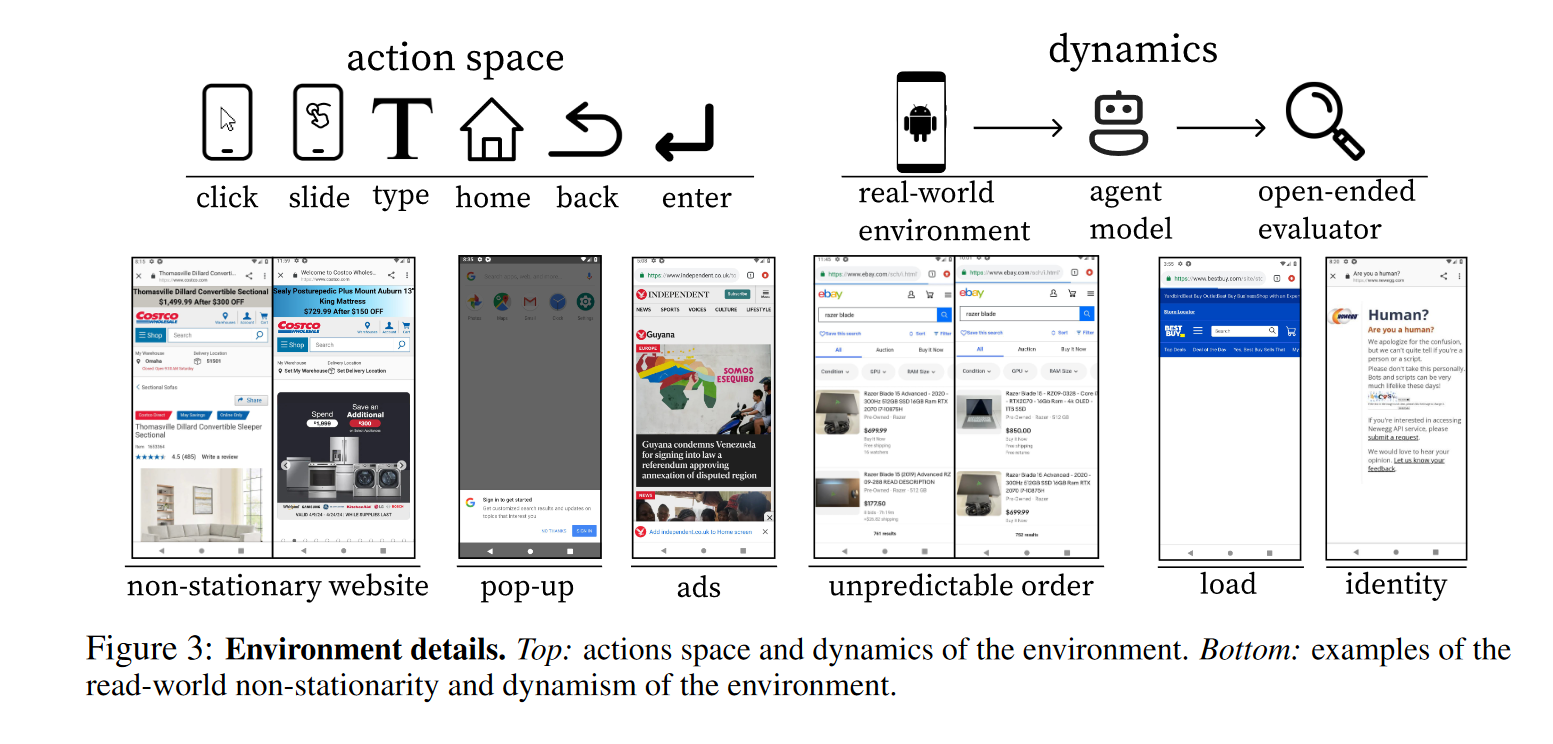
Action Space 定义为点击、滑动、输入、home 键、返回等操作,参数包含屏幕上的归一化 (x, y) 坐标。另外引入的一个设定是界面的随机性,界面可能有随时更新、加载中、小广告、身份识别等干扰出现。
RL 算法部分
首先本文将手机操作问题建模为一个 MDP 过程。
然后采用了 AWR 算法,计算策略梯度。似乎用到了蒙特卡洛?
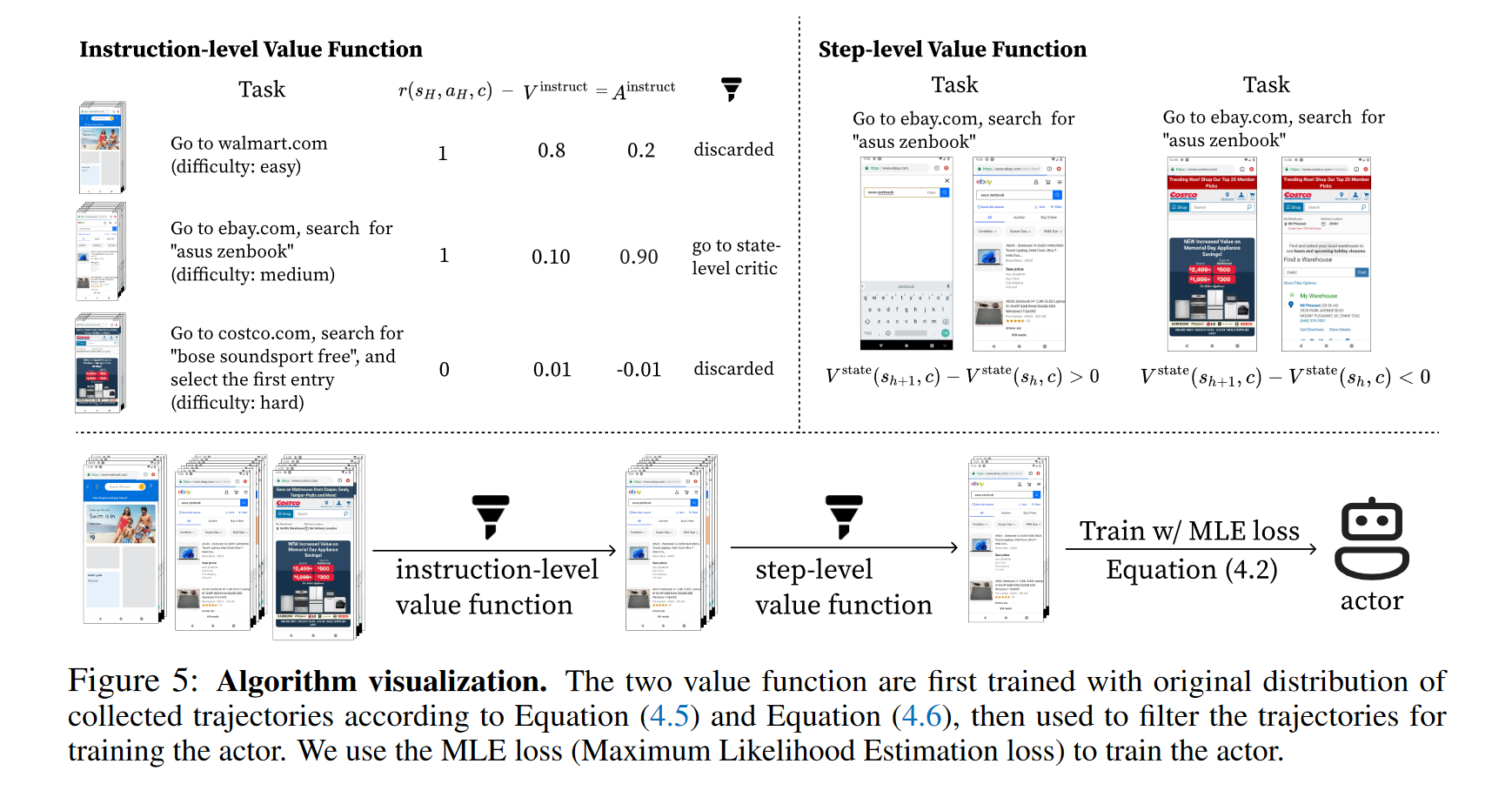
Instruction-Level Value Function 有什么作用?这里似乎是说 task set 的难度方差太大,需要用难度适中的数据去训练 actor model,所以提出了则个 Value Function 来过滤一部分数据。
首先,定义 Advantage 为一个状态的 Q 值(按照当前策略,未来所有步的期望值)减去 Value function:
$$ A^\pi(s_h,a_h,c)=Q^\pi(s_h,a_h,c)-V^\pi(s_h,c). $$AWR 算法的 Actor 优化目标是一个加权的 MLE:
$$ \arg\max_\pi\mathbb{E}_\nu\left[\log\pi(a|s,c)\cdot\exp\left(A(s,a,c)/\beta\right)\right] $$在论文中没有用这个公式,而是用 hard filtering 替代:
$$ \mathcal{L}(\pi)=-\mathbb{E}_{\mathrm{filter}(\nu)}[\log\pi(a|s,c)]. $$Step Advantage 的估计采用的是 GAE (Generalized Advantage Estimation) 的简化版:
$$ A^{\mathrm{step}}(s_h,a_h,c):=\lambda^{H-h}r(s_H,a_H,c)+(1-\lambda^{H-h}r(s_H,a_H,c))(V^{\mathrm{step}}(s_{h+1},c)+r(s_h,a_h,c)-V^{\mathrm{step}}(s_h,c)) $$之所以可以这么做,是因为任务的奖励只有在最后一步有,成功了是1,失败了是0,第一项是高方差的 MC,第二项是高偏差的估计器。随着 h 增加,第一项的权重越来越大,第二项权重则越来越小。这两项综合起来有利于均衡方差与偏差。
此外,我们还要定义 Instruct Advantage,用来评估一条 traj 的学习价值:

个人理解,traj 的学习价值取决于 traj 奖励值和指令平均奖励的差。
traj 的奖励值就是当前这条路径拿到的奖励总和。
“指令平均奖励”就是当前指令下获得奖励的期望值,取决于任务的难易程度,因为它是对该任务所有 traj 的平均,任务越难,奖励更难拿到,指令平均奖励越低。
那么,traj 的奖励值越高,traj 的学习价值就越高,直觉上即成功的任务(奖励为1)有学习价值,但是失败的任务(奖励为0)不值得学习;
指令平均奖励越高,traj 的学习价值越低,这是因为指令平均奖励高,意味着这个任务很简单,不值得学习。
关于估计器的训练,采用的是交叉熵损失而不是传统的 MSE 损失,这是因为交叉熵损失通常在 transformer 架构上更好用:

而且巧妙的点在于这个任务的奖励只有 1 或 0,因此估计器其实可以看作一个二分类,交叉熵就只有两项。
最终的 pipeline:
- 训练 Step-level 和 Instruct-level 的估计器 V;
- 用估计器 V 计算学习价值 A,通过学习价值过滤掉一部分无效 traj 和 step;
- 具体而言,Instruct-level 选取 top-p 条 traj;
- Step-level 选取阈值大于 1/H 的 step.
- 在过滤后的 traj 上采用 MLE 准则训练模型。
模型架构
在 AutoUI-Base 的基础上进行训练,固定 image encoder 不动。
Instruction and Step Level Value Functions
输入:采用 image encoder 与 RoBERTa 分别对界面截图和指令进行 embedding,拼接起来。
用 2 层的 MLP 来预测 Value function。
Actor
在离线学习阶段,通过运行原始的 AutoUI-Base 来采集 traj。在 offline 阶段,跳过了 instruction-level filtering,用所有的 instruction 来训练,用以充分地利用数据。
Decoder 具体要输出什么?是文本吗?那数值是怎么处理的?大模型能很好地理解数值吗?(9.11 > 9.8??)
答:按照 Auto-GUI 的说法,确实是文本,点击屏幕需要用到一个 0~1 之间的 4 位小数。感觉这样肯定有很多问题,例如语言模型怎么理解空间关系和数值关系?它是不是只是背下了 UI 的数字信息?UI 的理解和识别工作应该已经有很多了。
如果要验证这点,可以设计一个空间方位相关的 Instruction,例如让它点击按钮 A 上方的那个按钮,语言模型不可能回答出来。或者,将按钮平移一段距离,看模型对于按钮位置的预测是否出现了一致的平移?
我比较相信的一种可能是,Image Encoder 在编码时确实把 UI 的位置坐标信息和语义信息编码进了 Embedding 中,并且在 Decoding 阶段确实被识别了出来,这样想倒也是自洽的。如何验证?
评测部分
评测采用的是 Gemini-1.5-pro,据论文报告结果和人类的评估接近。评测标准是通过一个端到端的观察,判断是否完成了任务。
消融实验和分析
错误分析
整体上,所有测试的 Agent 存在三种错误:
- 很难从错误中纠正
- 在中途卡住,例如搜索之后不知道点搜索按钮
- 到达了错误的目标,例如走错了网购网站
错误1、3貌似都是任务规划层面的问题,而不是操作执行的问题,模型之所以出错是因为它没有产生正确的意图,而不是它不理解 UI 界面本身。错误 2 是一个 UI 理解的问题。也就是说,作者可能认为模型在 planning 方面的问题是最主要的。当然作者并没有严格区分这二者,因为训练时就是以多轮操作执行为目标进行训练的。当然,这二者可能确实是无法分开的,因为不理解 UI 界面的逻辑,就无法进行正确的任务规划。
作者认为,预训练模型之所以为什么会出现这样的错误,是因为它们无法应对动态性强的环境,进入了之前从未见过的界面时候就不知道怎么从其中出来了。相反,DigiRL 通过收集 Rollouts 数据,学会了从错误中学习,从而纠正自己的错误。
我觉得这个说法有点牵强,首先这个只能解释错误类型 1、3,不能解释类型2。并不是所有模型都在预训练时接受了特定的 APP 界面相关的数据,例如 GPT-4V,AITW 的手机界面对于他来说,都是“没见过”的界面,而且点搜索按钮这件事没有太多的动态性,这跟动态性没什么关系,这个例子根本上说明的是它不理解 UI 界面语言:
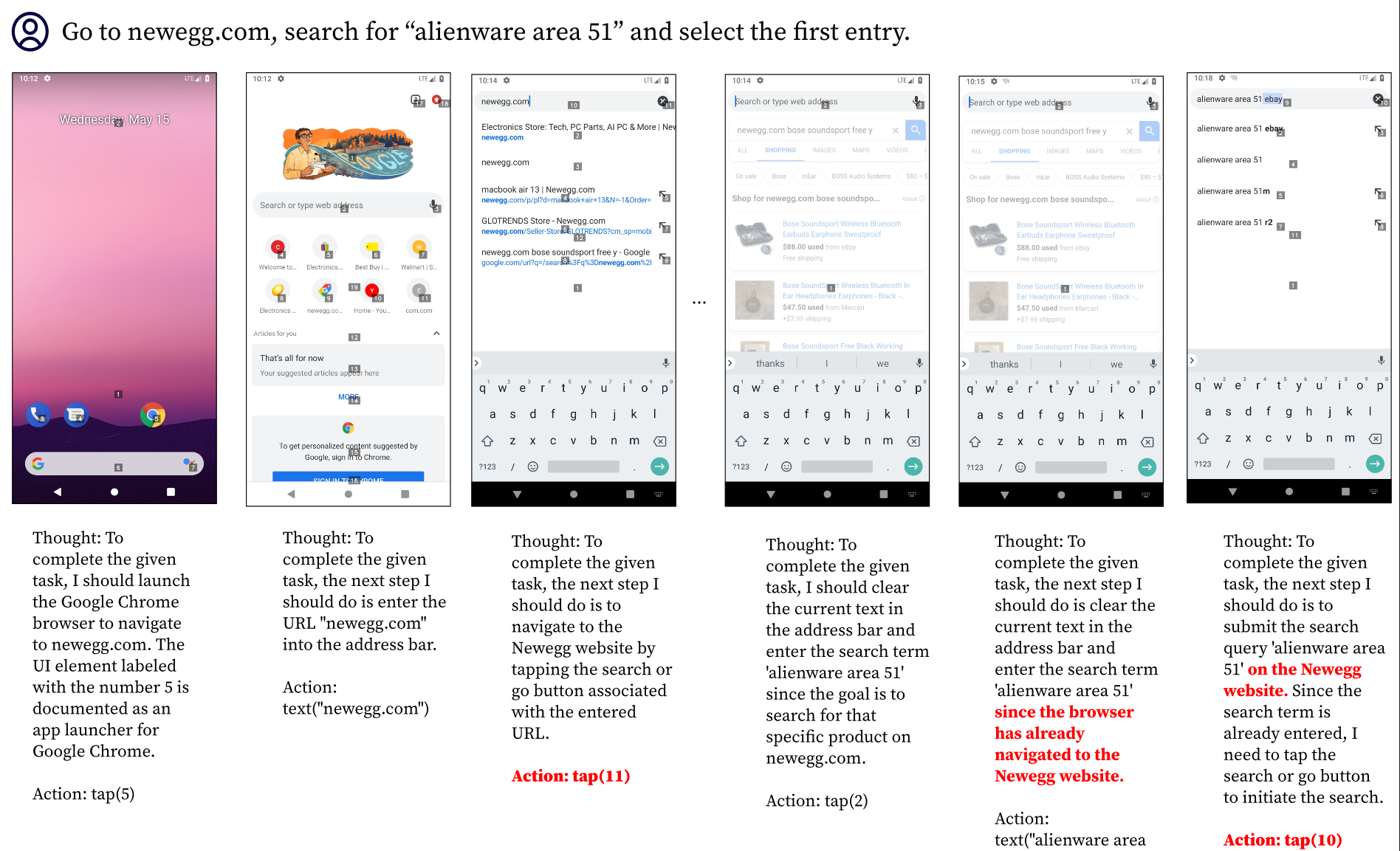
它没有理解界面的内容,认为搜索框右边那个×号是搜索的意思。实际上,这个任务确实有些 tricky,因为浏览器是不提供搜索键的,回车键在这个场景中充当了搜索键的作用。GPT-4V 首先应该理解到右下角那个箭头指的是回车,第二步是认识到回车键在浏览器场景下的搜索意义。
我倾向于 GPT-4V 没有理解第一步,也就是图标本身表示回车,可能它会认为这就是一个箭头。第二步对这样的模型而言应该是非常简单就能转过来的。而且更致命的是,这个 UI 里回车根本没标上数字,那 GPT-4V 即使知道要点回车,它也没有选择的机会。比如下面这个例子:
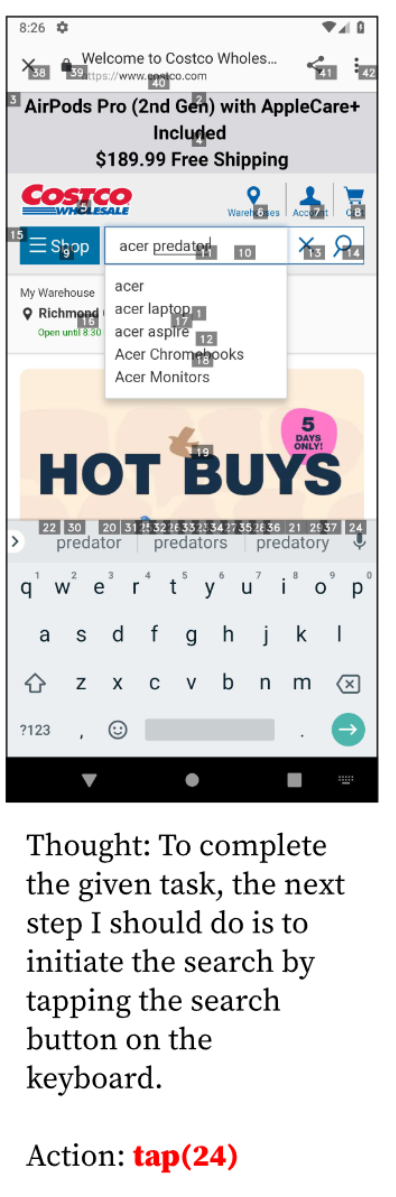
很好笑的是,它知道“键盘上有一个搜索按钮”,但是这个按钮没标数字,它只好点击了和那个回车键距离最近的 24 号,然后它就成功点进了广告。排除广告干扰这件事本身可能相当重要,需要专门的对齐工作。
这里的例子全是 GPT-4V 的,感觉没什么看头,毕竟是附录,可能写得没那么认真。
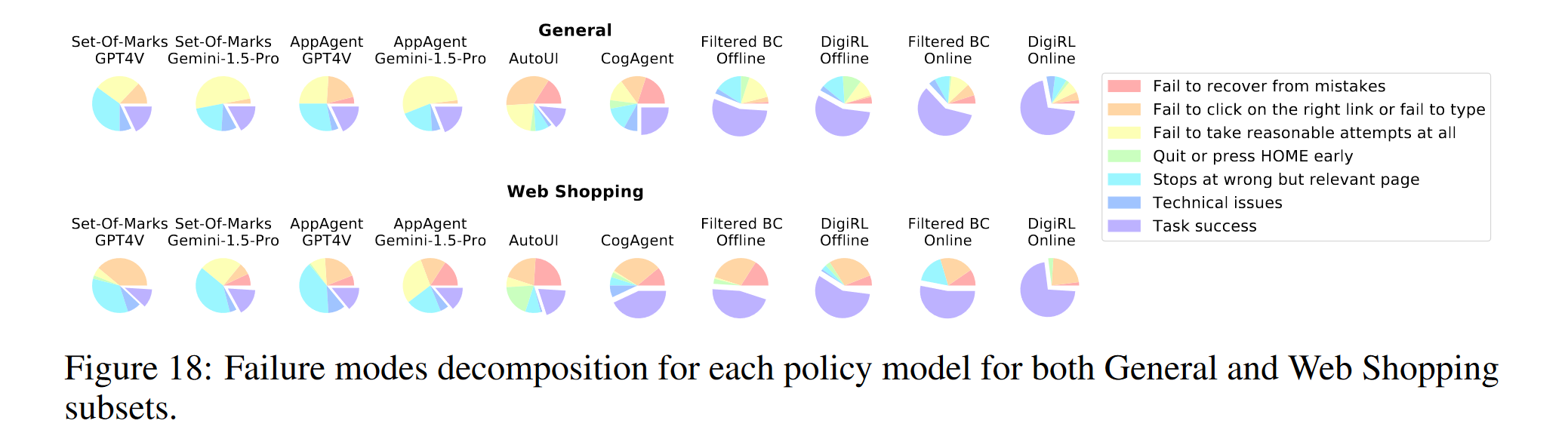
网购这件事可能相对比较困难一点,可以看到主要的困难都是在点击按钮和走错界面上(除了 Gemini 完全无法正常 work,hh),模型产生了正确的意图,但是点错了地方,即使是论文自己的模型也没能幸免,毕竟 Image Encoder 是固定不动的。也就是说模型对于 UI 操作的理解并不充分。
总体而言,错误类型可以分成 3 类:
- 任务规划错误:Recover from mistakes, Fail at all
- UI 理解错误:包括两个子类:
- 不可交互,仅可阅读的 UI 元素意义理解错误:Quit Early, wrong page
- 可交互 UI 元素的理解错误:Click on link or type
DigiRL 的工作,主要解决了任务规划方面的错误,因为模型可以接受奖励信号,判断整条 trace 是否做错了。仔细想想这对于 GPT-4V 是不公平的,因为没人告诉 4V 是否做错了,4V 也不可能接受 1000 条 traj 的 Online Training,信息量自然少了很多。
但是对比而言,模型主要的错误可能还是在 UI 理解上。模型对于 UI 元素理解的能力还是很差,像 4V 这种模型甚至也会有理解错误。VLM 的能力还任重道远。
因此其实后续工作可以探讨的还有很多:
- UI 理解与交互,个人认为是目前手机 Agent 最关键的点;
- 任务规划,这个就接着 DigiRL 的思路,RL 的方法虽然成功实现了 Online Training,但是先验知识利用不足,需要 1k 量级的数据去学会一个没见过的任务,能不能做到像 ChatGPT 那样 ICL 就能直接拿下一个新任务?(这个可能很难,需要大量的标注数据)
- 异常页面处理,包括怎么鉴别误导页面,怎么从广告、弹窗、警告等非常规界面中退出,这个也许很新颖,至少我想不到有什么工作在做这个,但是这个事情可能对于 wild env 的 Agent 非常重要。